Hi mmg community,
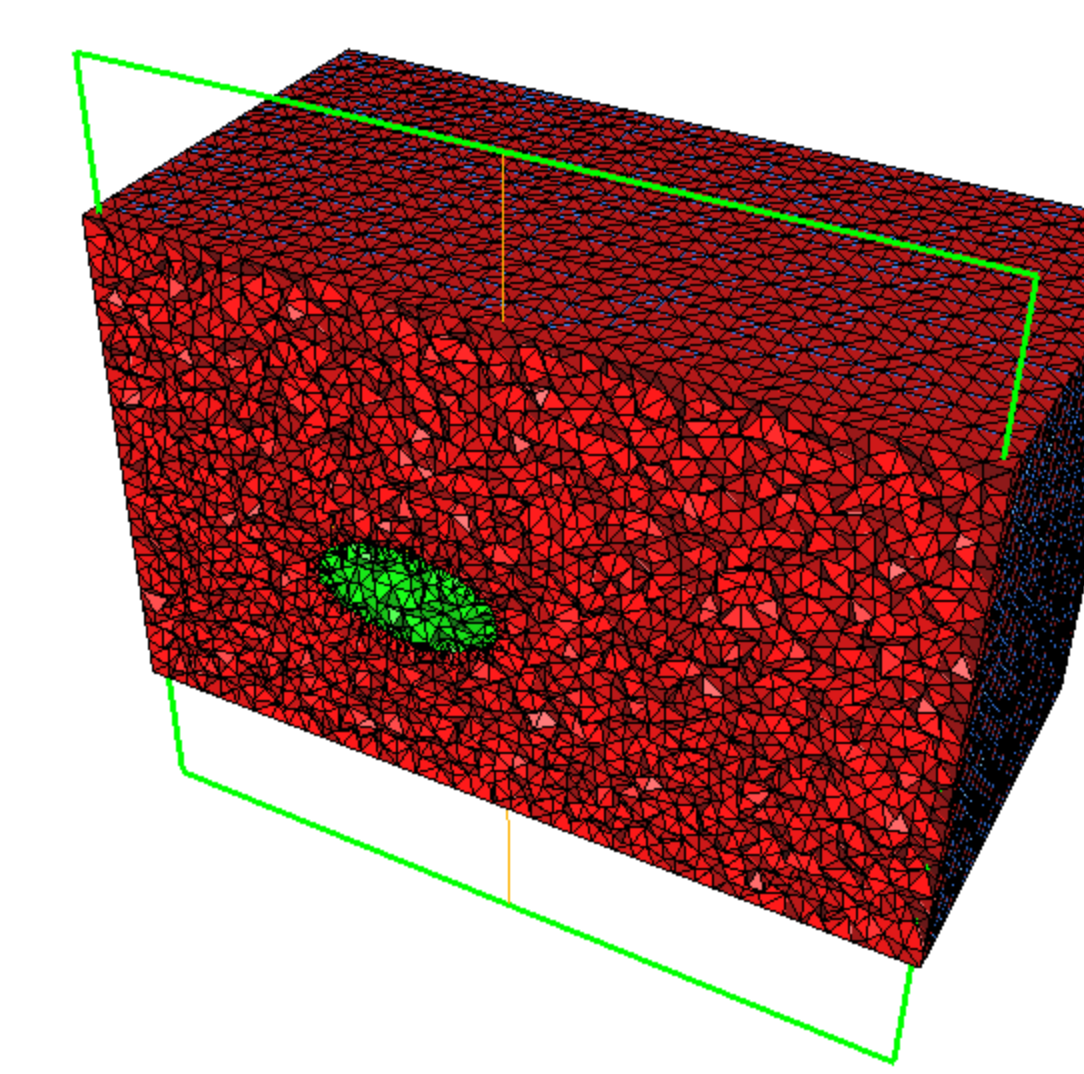
I have been running the Lagrangian movement mode with constant mesh connectivity (-lag 0) to deform a closed 2D surface within a 3D mesh.
When the surface is smooth then it works fine.
However I have two test cases where the movement is not being processed.
-
Test case 0 runs fine
https://drive.google.com/open?id=1heJmnrnyKQ3izdACjC6B6bHMEiC15Csd
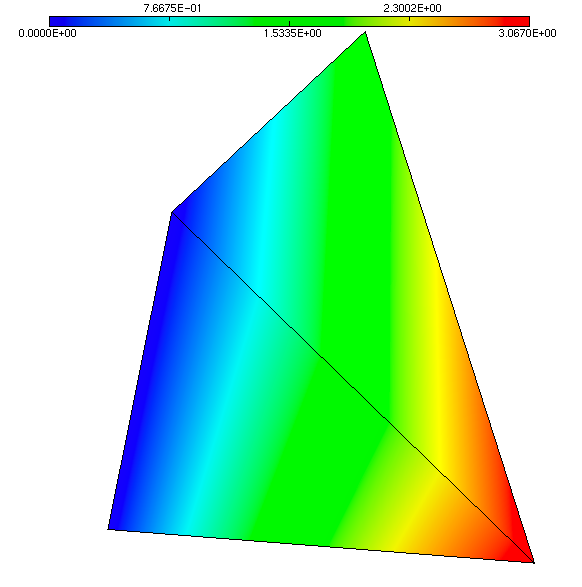
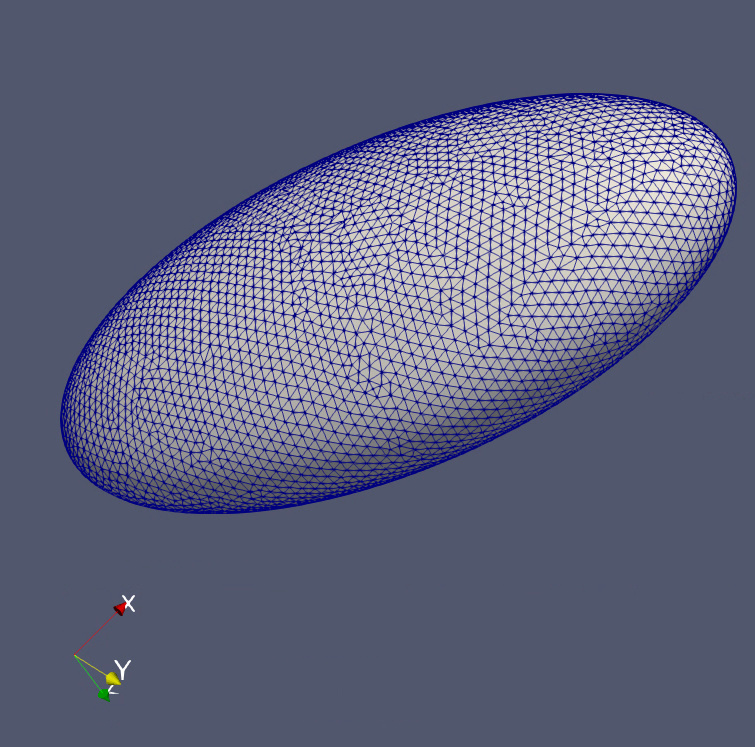
Input 2D surface
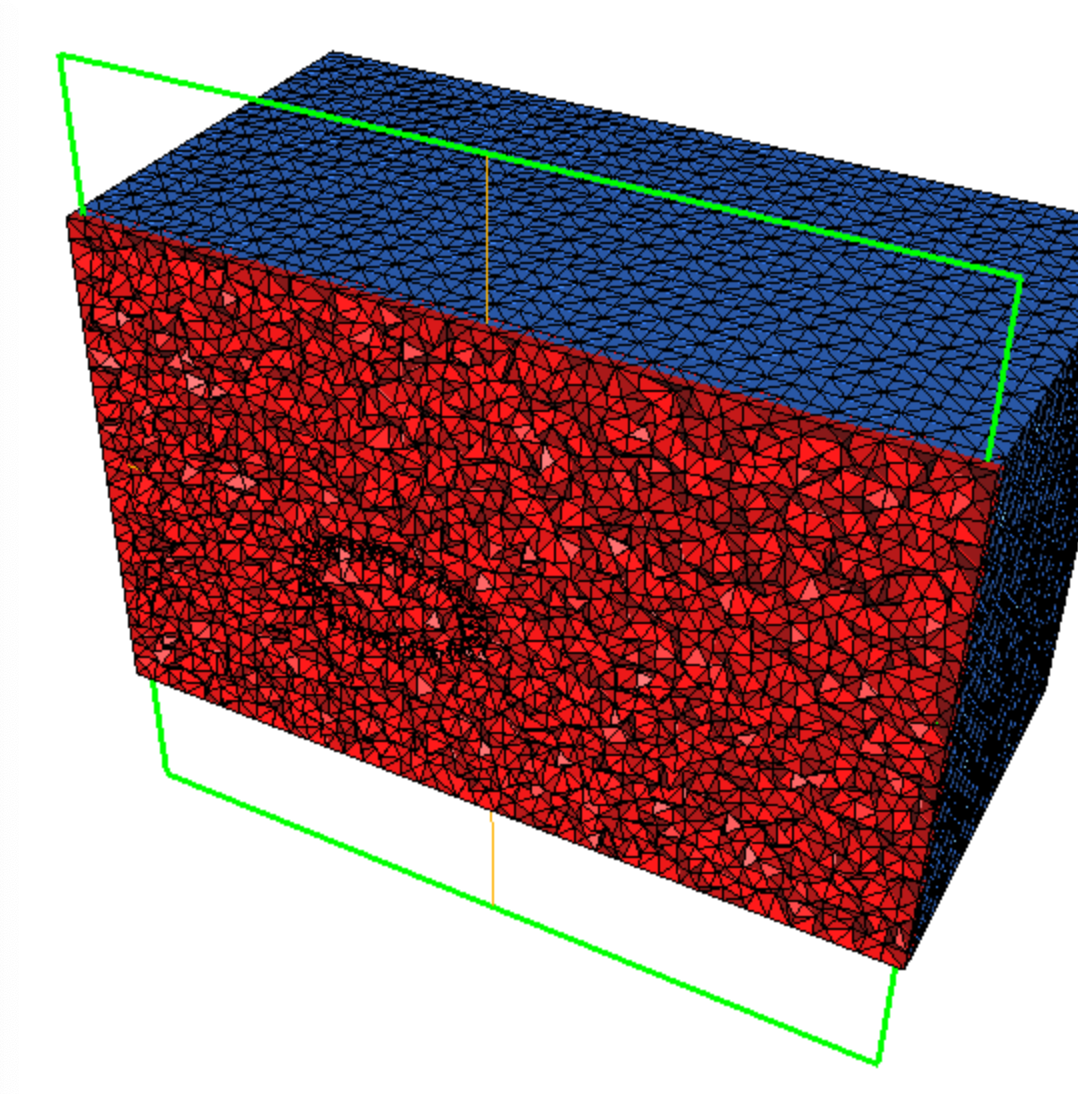
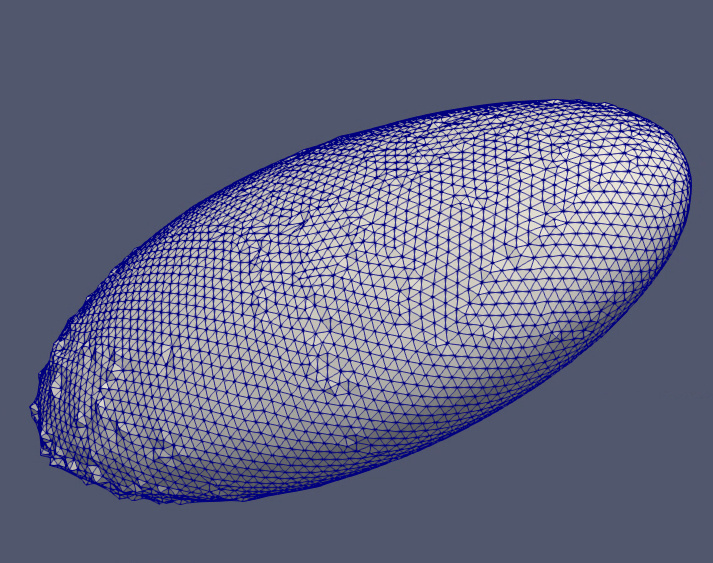
Output 2D surface
-
In the test case 1 the movement is displayed at 100% processed but nothing moved.
https://drive.google.com/open?id=1y7Gde1wpaNy0uylqihC8jwHY7n7eL3HC -
In the test case 2, nothing moves and the processed movement is displayed at 0%.
https://drive.google.com/open?id=1lwIAYRK06EQ0kzJijh5_1cpth5TfJFRZ
//The reference boundary is set to 1 in src/common/mmgcommon.h.in
#define MMG5_DISPREF 1
// The maximum number of iterations is set to 100 in src/mmg3d/mmg3d3.c
maxitmn=100;
# The command I used to run the test cases
./mmg3d_O3 -in mesh_init_bot_0.1 -out mesh_init_bot_0.1.o.mesh -sol movement.sol -lag 0
I understand that the movement cannot always be processed at 100%, which is fine.
Yet I am not sure to see in which case no movement at all can be processed since:
- we keep a constant mesh connectivity, so there cannot be an intersection with the bounding box or any other boundary
- the mesh seems coarse enough so that the default 20 layers element submesh can handle the movement (or at least part of it)
Is there something else that I have missed?
Thanks for your help,